Vision & Navigation
Schwerpunktthemen
GPS-Systeme, automatisierte Gesichtserkennung, 3D-Objekterkennung und Klassifizierung oder autonom navigierende Roboter– Anwendungen aus Vision und Navigation spielen sowohl im Alltag als auch in vielen Industriebereichen eine immer wichtigere Rolle.
Im IMS-Bereich „Vision und Navigation“ liegt der Fokus einerseits auf der Vermessung und Erkennung von Objekten und andererseits auf der Entwicklung von autonomen mobilen Systemen aller Art. Nebst eigenen Projekten wirken die Mitarbeiter des Bereichs „Vision und Navigation“ mit ihrem fundierten Know-how auch bei Forschungsprojekten anderer Institutsschwerpunkte unterstützend mit. Die dadurch erworbene Interdisziplinarität erlaubt eine massgeschneiderte und effiziente Umsetzung innovativer Lösungsansätze.
Fokus:
- Optische, Inertial- und Positionssensorik
- 2D- und 3D-Vermessung
- Positionierung und Steuerung von autonomen Systemen
- Sensor und Data Fusion
- Echtzeitdatenverarbeitung
Weitere Infos:
Erfahren Sie mehr über unsere Arbeit und unsere Tools.
Teamleiter und Ansprechpartner Vision & Navigation
Prof. Dr. Hans Wernher van de Venn
ZHAW
School of Engineering
Institut für Mechatronische Systeme
Technikumstrasse 5
8400 Winterthur
Projekte in Vision & Navigation
ARTIS - Advanced Rail Track Information System
Das Ziel des ARTIS Projektes ist die Entwicklung eines fortschrittlichen Echtzeit Datenerfassungs- und Verarbeitungssystem für 3D Daten im Kontext von Bahnvermessungsanwendungen. Mehr Informationen zu diesem Projekt
AVERT: Sichere Beseitigung von verdächtigen Fahrzeugen

Das Autonomous Vehicle Emergency Recovery Tool (AVERT) ermöglicht die schnelle und sichere Beseitigung von blockierenden oder verdächtigen Fahrzeugen aus heiklen Positionen und schwer zugänglichen Räumen. Mehr Informationen zu diesem Projekt
Vision-Control-Systeme

Das IMS realisiert zusammen mit Graf+Cie AG Vision-Control-Systeme zur Prozessoptimierung und Qualitätssicherung in der Fertigung von Technologieteilen für Textilmaschinen.
3D Mosaic: Intelligentes Plantagen-Management

Innerhalb einer Obstplantage variiert der Wasserbedarf aufgrund klimatischer Bedingungen sowie Boden- und Pflanzeneigenschaften räumlich und zeitlich. Optimales Plantagenmanagement muss deshalb saisonale und räumliche Variablen des Boden- und Mikroklimas berücksichtigen, welche Pflanzenwachstum und Fruchtentwicklung beeinflussen können. Räumliche Bedarfs-Muster aufgrund von Boden- und Pflanzeneigenschaften können als 3D-Mosaik betrachtet werden. Mehr Informationen zu diesem Projekt
SmartWeeder: Sensorgeführte Unkrautbehandlung

SmartWeeder gehört zur nächsten Generation von Unkrautbehandlungssystemen. Unter dem Motto „Let the Machines do the Job“ arbeiten Experten aus Landwirtschaft, Bildverarbeitung, 3D-Datenauswertung und Mechatronik am ambitionierten Ziel „Der elektronische Landwirt“. Mehr Informationen zu diesem Projekt
ShoeExpert: Automatisierte Erkennung von Abdrücken

Im Projekt ShoeExpert wurde ein Assistenzsystem zur automatisierten Erfassung, Analyse und Klassifizierung von Schuh- und Reifenabdrucken entwickelt. Mehr Informationen zu diesem Projekt
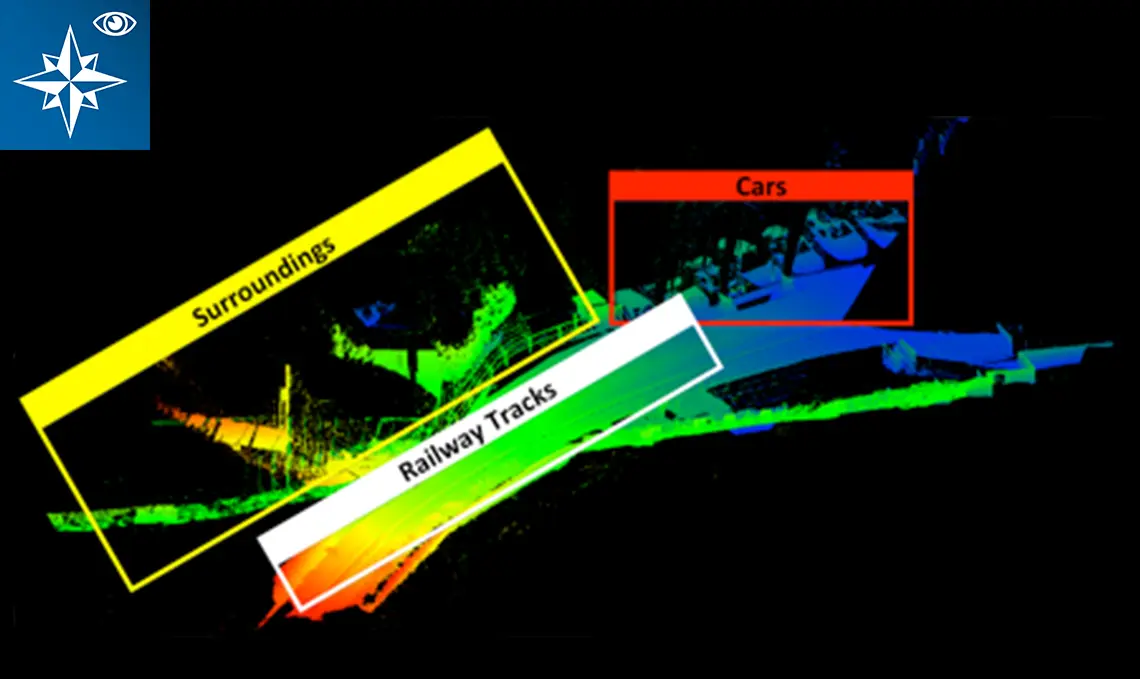
Rail Clouds: Eisenbahn-Infrastruktur in 3D-Punktewolken

Im Projekt Rail Clouds untersuchte das IMS zusammen mit dem Partnerunternehmen Amberg Technologies verschiedene Möglichkeiten zur Verarbeitung von 3D-Punktewolken im Bereich der Eisenbahn-Infrastruktur. Mehr Informationen zu diesem Projekt
MAVERrIC - Modular Autonomous Vehicle

Unbemannte Landfahrzeuge (engl. Unmanned Ground Vehicle UGV) werden in der Zukunft vermehrt eingesetzt, um Prozesse zu automatisieren, die zurzeit noch manuell oder teilmaschinell ausgeführt werden. Mehr Informationen zu diesem Projekt
Parkmate: Einparkhilfe der nächsten Generation

Parkmate ist ein Assistenzsystem für halbautomatisches Einparken. Das System vermisst die Parklücke und berechnet eine optimale Trajektorie zum Einparken. Mehr Informationen zu diesem Projekt
SmartParking: Autonom parkierendes Fahrzeug

Im Projekt SmartParking wurde ein Parkautomat entwickelt, der autonom fahren, Hindernisse erfassen, diesen ausweichen und in eine vorgegebene Parklücke seitlich einparken kann. Mehr Informationen zu diesem Projekt