XoSoft - Soft modular exoskeleton to assist people with mobility impairments
Together with their European partners, ZHAW researchers are developing an intelligent assistive walking device that can harden or soften, depending on the movement made.
Many people experience varying degrees of mobility impairment due to an accident or afflictions of old age. Assistive devices play a pivotal role in their lives and impact on their ability to live independently and perform basic tasks of daily living. Yet most assistive devices, such as powered wheel chairs, do not encourage or support the activation of legs, which is essential to prevent further atrophy. An international, multidisciplinary consortium of researchers from nine organisations and seven European countries has therefore set out to develop, within the framework of the European Union’s Horizon 2020 Research and Innovation Programme, a novel solution: a wearable, intelligent clothing system named XoSoft.
Background
Between 2000 and 2050, the older population (80 years +) is projected to almost quadruple from approximately 100 million to 395 million people worldwide. Many people experience varying degrees of mobility impairment due to an accident or afflictions of old age. Assistive devices play a pivotal role in their lives and impact on their ability to live independently and perform basic tasks of daily living. There are currently 40 million people in Europe who cannot walk without an aid. Yet most assistive devices, such as powered wheel chairs, do not encourage or support the activation of legs. XoSoft should answer the need of these and other user groups for low to moderate mobility assistance. The exoskeleton is developed by a consortium of five research groups and three companies with EU project experience in exoskeleton / assistive orthotics development.
Objective
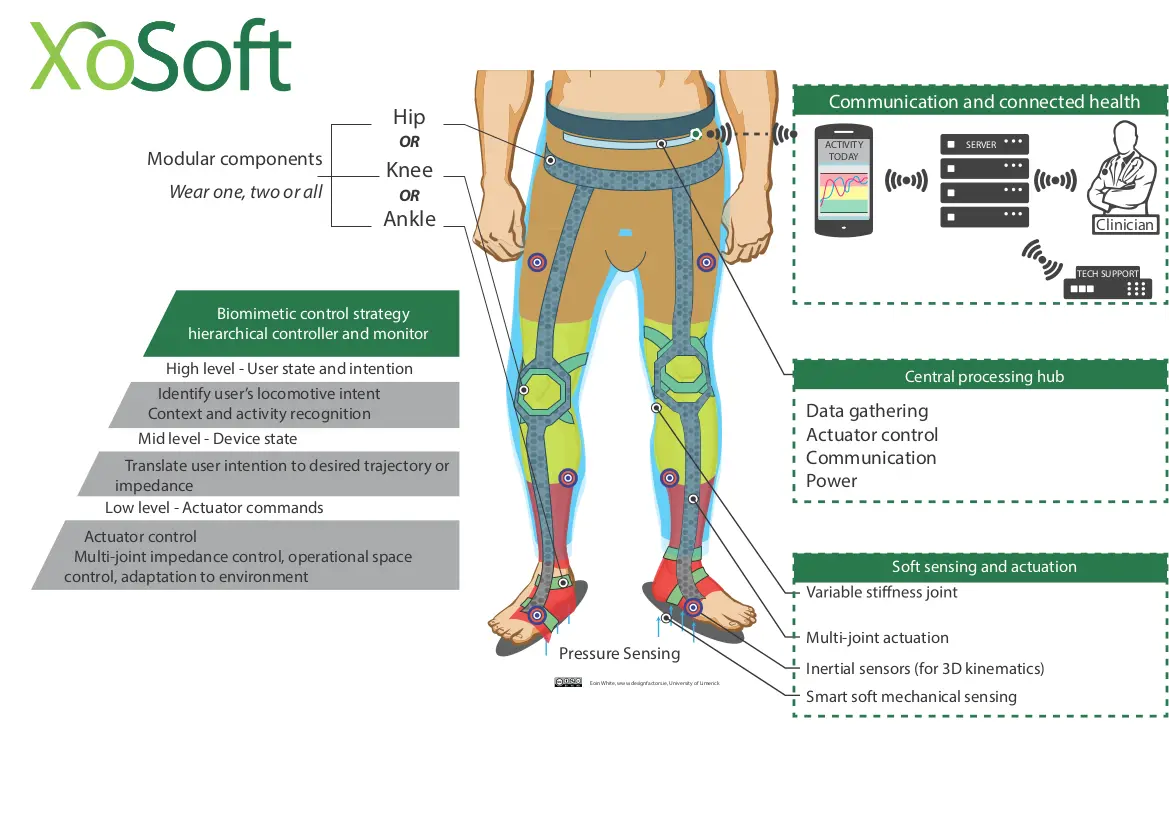
The overall aim of this multidisciplinary research action is to develop a soft, modular, lower limb exoskeleton that elderly and disabled people with mobility impairments can wear to increase their mobility and to assist their leg strength and support.
XoSoft will employ smart soft robotics, biomimetic controlled actuation and connected health data feedback and interface.
Methods and Procedure
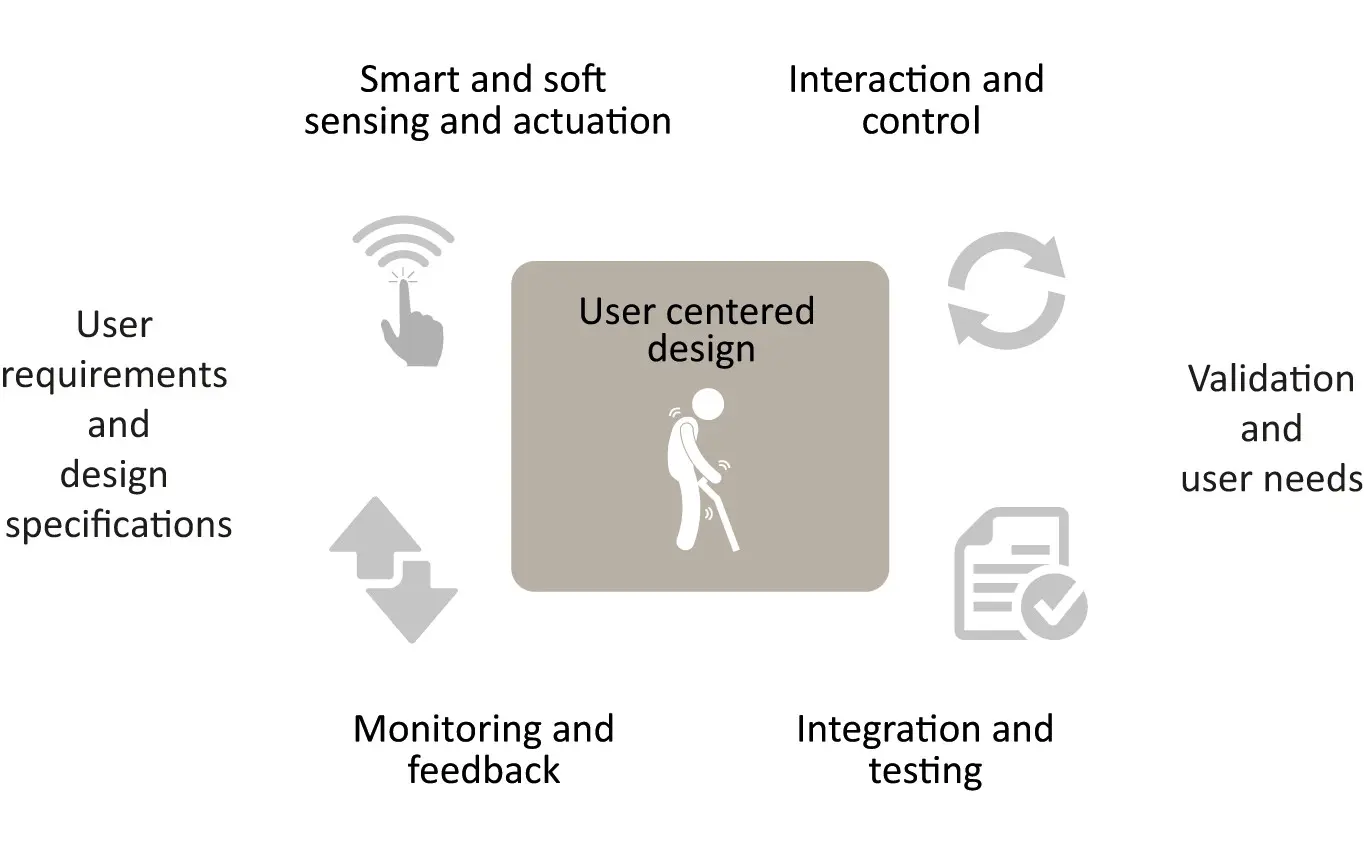
A core feature of XoSoft is that it follows a user centred design approach. The figure below illustrates the XoSoft design and development approach, which is subdivided into nine Work Packages. User requirements and design specifications are established before concept technology development commences.
The design is realised in the selection of technologies, which are developed based on their ability to deliver the user centred design solution. Finally, the mature prototype will be evaluated in clinical and home trials.
Project partners

Fondazione Istituto Italiano di Tecnologia (IT) 
Consejo Superior de Investigaciones Cientificas (ES) 
Össur hf (IS) 
University of Limerick (IE) 
ZHAW Institut für Mechatronische Systems (CH) 
accelopment AG (CH) 
Roessingh 
Saxion University of Applied Sciences (NL) 
Geriatrie-Zentrum Erlangen (DE) 
Istituto Italiano di Tecnologia
Project Organisation
- Project leadership ZHAW Insitute of Physiotherapy
Prof. Dr. Eveline Graf, Prof. Dr. Markus Wirz - Project duration
1st February 2016 – 31st January 2019 - Project team ZHAW
Ass. Prof. Dr. Christoph Bauer, Carole Pauli, Antonia Hauswirth - Funding
Horizon 2020 Framework Programme of the European Union, ICT-Robotics - Project status
Completed
Publications and Reports
- March 2016, ZHAW-Impact
EU Forschung trotz schwieriger Bedingungen - 2017, Swiss Textiles, Above all expectations, Swiss Pavilion Techtextile 2017, S.12
Intelligent leggins for safe movement in daily life - 17th October 2016, Siliconrepublic
UL scientists to help build ‘smart clothing’ of the future
ZHAW publication database
-
Graf, Eveline; Bauer, Christoph; Pauli, Carole; Wirz, Markus,
2021.
In:
Moreno, Juan C.; Masood, Jawad; Schneider, Urs; Maufroy, Christophe; Pons, Jose L., eds.,
Wearable robotics : challenges and trends.
WeRob2020 : 5th International Symposium on Wearable Robotics, virtual, 13-16 October 2020.
Cham:
Springer.
Available from: https://doi.org/10.1007/978-3-030-69547-7_33
-
Di Natali, Christian; Sadeghi, Ali; Mondini, Alessio; Bottenberg, Eliza; Hartigan, Bernard; De Eyto, Adam; O'Sullivan, Leonard; Rocon, Eduardo; Stadler, Konrad; Mazzolai, Barbara; Caldwell, Darwin G.; Ortiz, Jesús,
2020.
Pneumatic quasi-passive actuation for soft assistive lower limbs exoskeleton.
Frontiers in Neurorobotics.
14(31).
Available from: https://doi.org/10.3389/fnbot.2020.00031
-
Pauli, Carole; Graf, Eveline; Wirz, Markus; Bauer, Christoph,
2019.
In:
ESMAC 2019 abstracts.
Annual Meeting of the European Society for Movement Analysis in Adults and Children (ESMAC), Amsterdam, 23-28 September 2019.
Elsevier.
pp. 284-285.
Available from: https://doi.org/10.1016/j.gaitpost.2019.07.317
-
Bauer, Christoph; Pauli, Carole; Wirz, Markus; Graf, Eveline,
2019.
Biomechanical effect of a soft biomimetic exoskeleton developed to improve gait after stroke[poster].
In:
World Confederation of Physical Therapy Congress, Geneva, 10-13 May 2019.
ZHAW Zürcher Hochschule für Angewandte Wissenschaften.
Available from: https://doi.org/10.21256/zhaw-19170
-
Graf, Eveline; Bauer, Christoph; Schülein, Samuel; de Eyto, Adam; Power, Valerie; Bottenberg, Eliza; Weyermann, Bianca; O'Sullivan, Leonard; Wirz, Markus,
2019.
Assessing usability of a prototype soft exoskeleton by involving people with gait impairments[poster].
In:
World Confederation for Physical Therapy (WCPT) Congress, Geneva, Switzerland, 10-13 May 2019.
ZHAW Zürcher Hochschule für Angewandte Wissenschaften.
Available from: https://doi.org/10.21256/zhaw-17968
-
Wirz, Markus; Bauer, Christoph; Pauli, Carole; Graf, Eveline,
2019.
Development of an assistive soft exoskeleton : a multistakeholder endeavour[poster].
In:
World Confederation of Physical Therapy Congress, Geneva, 10-13 May 2019.
ZHAW Zürcher Hochschule für Angewandte Wissenschaften.
Available from: https://doi.org/10.21256/zhaw-19150
-
Hidalgo Romero, Andres F.; Graf, Eveline; Rocon, Eduardo,
2019.
An optimization approach to design control strategies for soft wearable passive exoskeletons.
In:
Carrozza, Maria Chiara; Micera, Silvestro; Pons, José L., eds.,
Wearable Robotics : Challenges and Trends.
Cham:
Springer.
pp. 525-529.
Biosystems & Biorobotics ; 22.
Available from: https://doi.org/10.1007/978-3-030-01887-0_102
-
Baten, Chris T. M.; de Vries, Wiebe; Schaake, Leendert; Witteveen, Juryt; Scherly, Daniel; Stadler, Konrad; Sanchez, Andres Hidalgo; Rocon, Eduardo; Plass-Oude Bos, Danny; Linssen, Jeroen,
2018.
In:
4th International Symposium on Wearable Robotics, WeRob2018, Pisa, (Italy), 16-20 October 2018.
Cham:
Springer.
pp. 391-395.
Biosystems & Biorobotics.
Available from: https://doi.org/10.1007/978-3-030-01887-0_75
-
Buurke, Jaap; Nikamp, Corien; Baten, Chris; Bauer, Christoph; Graf, Eveline; Schuelein, Samuel; Power, Valerie; O'Sullivan, Leonard; de Eyto, Adam; Ortiz, Jesús,
2017.
XoSoft : development of a soft modular lower limb exoskeleton.
Gait & Posture.
57(Supplement 1), pp. 274.
Available from: https://doi.org/10.1016/j.gaitpost.2017.06.413