LIDAR Flugführung – Hindernisdarstellung auf der mobilen Remote Pilot Station
Voxel-Darstellung in der Flugerprobung: Hochauflösende LIDAR-Daten werden zur Visualisierung von Hindernissen genutzt, um das Situationsbewusstsein von Piloten zu verbessern.
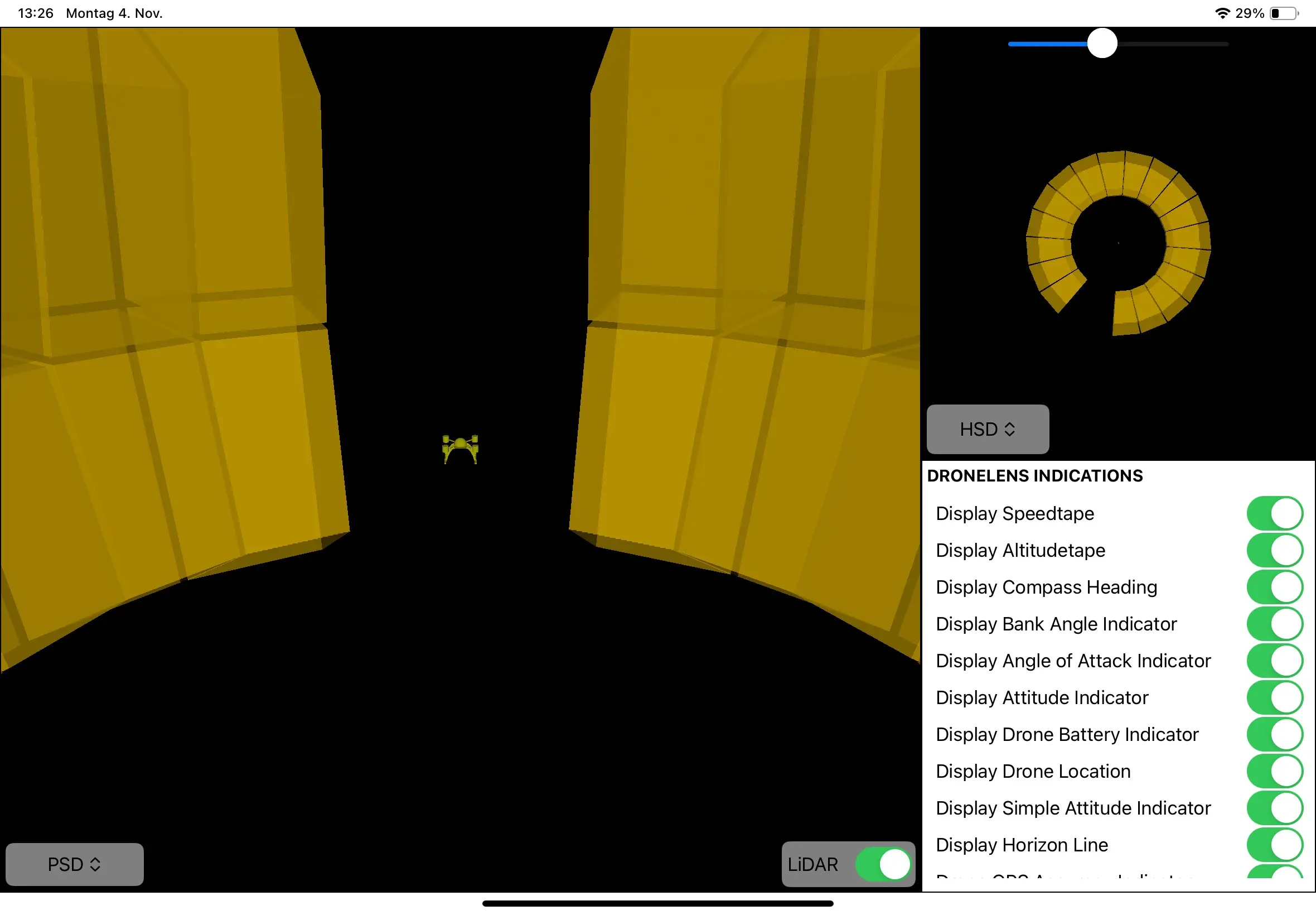
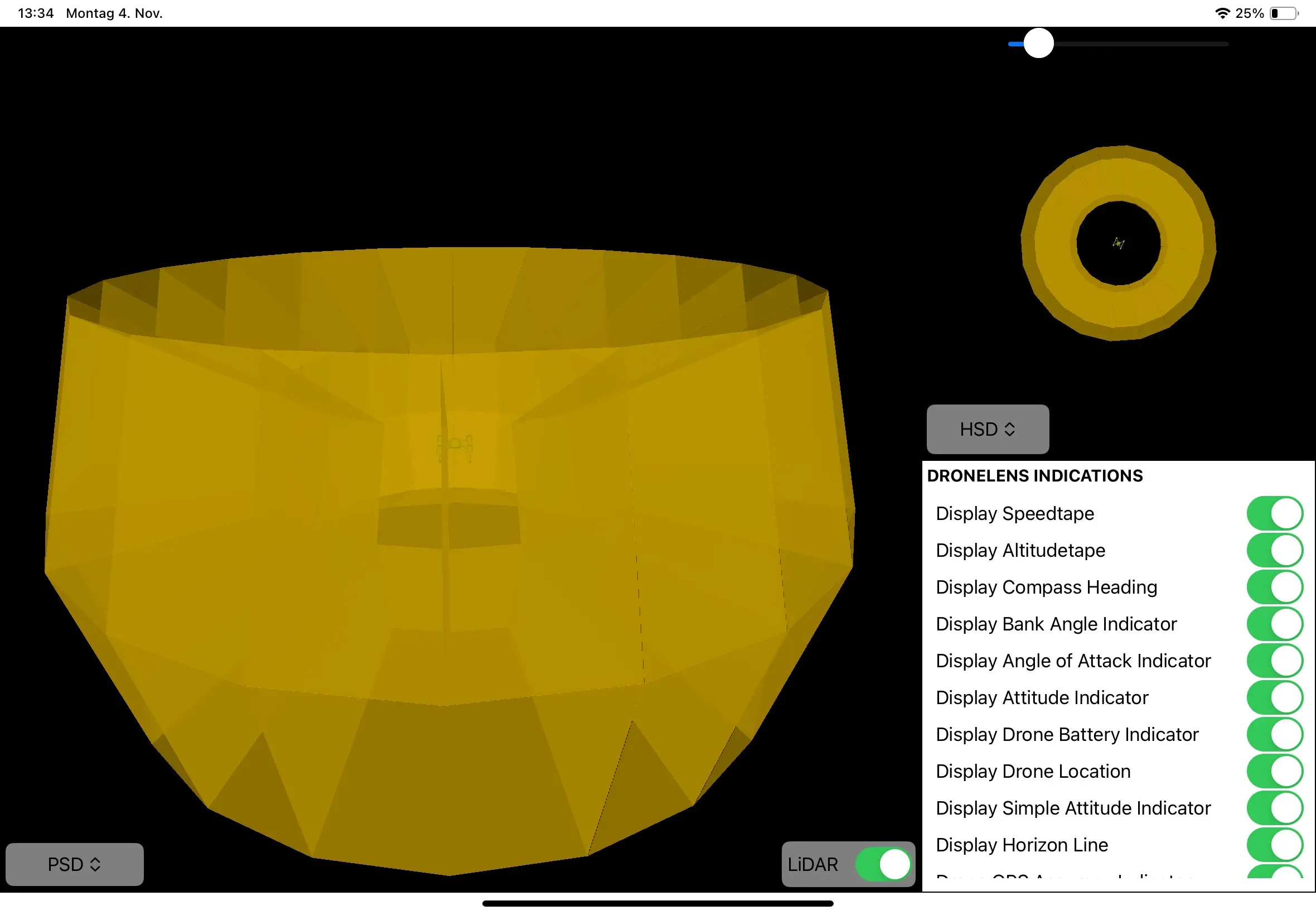
Das Voxel-Visualisierungskonzept nutzt Punktwolkendaten von LiDAR-Sensoren, um Hindernisse im Luftraum für Piloten auf dem mRPS darzustellen. Voxel sind quaderförmige 3D-Elemente, die Hindernisse visualisieren, wobei der Pilot zwischen verschiedenen Darstellungsoptionen wählen kann. Wird ein Hindernis erkannt, wird das Voxel im entsprechenden Sektor angezeigt.
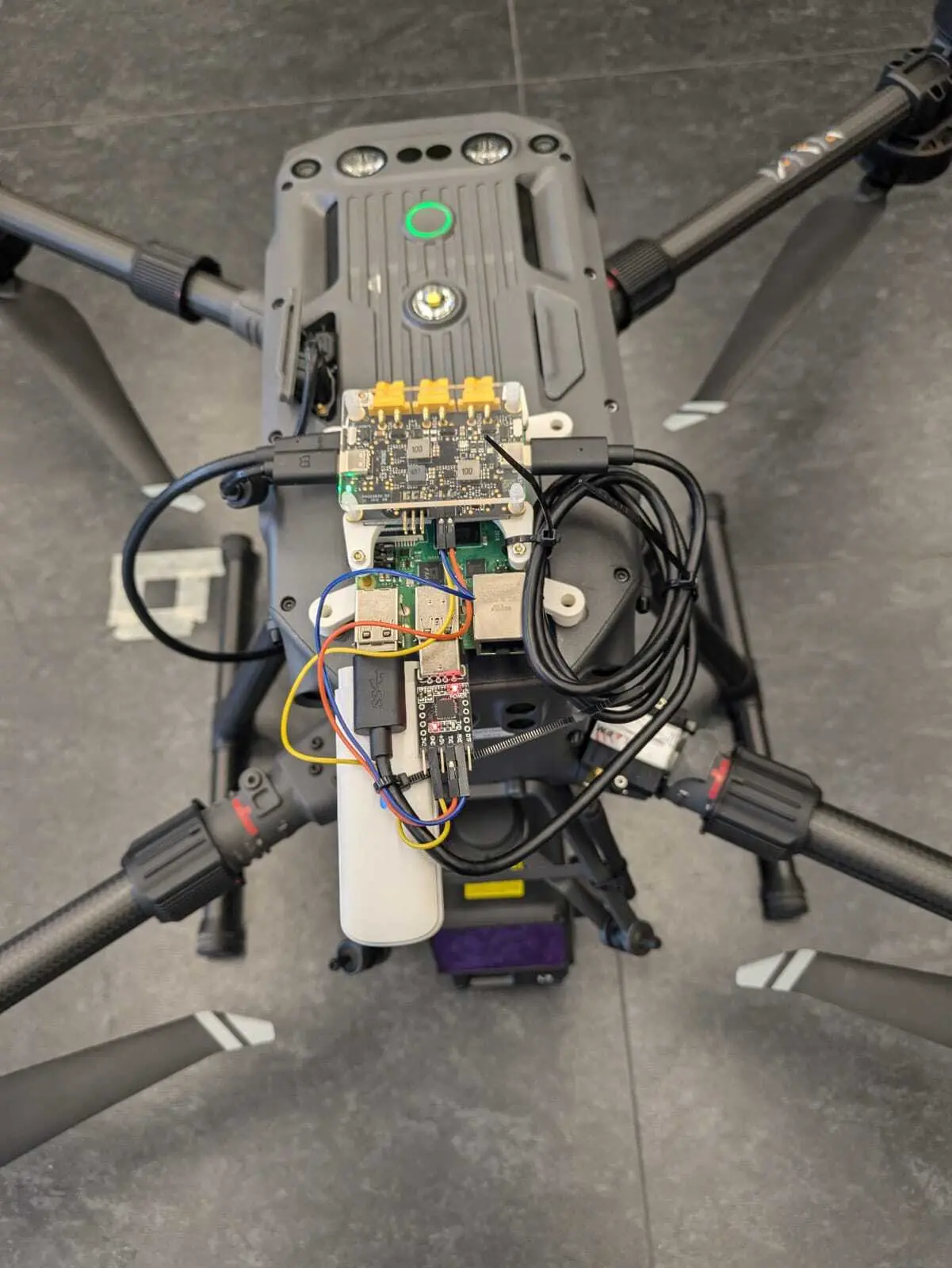
Die Voxel-Darstellung ist bereits seit einiger Zeit in Arbeit und wurde durch technische Probleme immer wieder verzögert. Die Verzögerungen ergaben sich in erster Linie dadurch, dass die bisher verwendeten LIDAR-Sensoren die Flugeigenschaften der eingesetzten Drohne, eine Matrice M300, durch ihr hohes Gewicht erheblich beeinträchtigten. Das alte LIDAR-System wurde daher durch das leichtere Zenmuse L2 LIDAR von DJI ersetzt.
Die LIDAR-Daten werden direkt auf der Drohne mit einem Raspberry Pi ausgelesen und über einen Server an das mRPS übertragen. Während die Verarbeitung der Daten auf der Drohne erfolgt, übernimmt die mRPS die visuelle Darstellung.
Die aktuelle visuelle Darstellung wird im Rahmen einer studentischen Projektarbeit evaluiert, wobei die Ergebnisse in eine zukünftige verbesserte Version einfliessen sollen.