Project example: Project in collaboration with FOCA: NEAPTIDE
Numerical Prediction and Experimental Assessment of Drone Noise
Motivation
The presence of drones in our environment has been steadily growing over the past few years, as drones are being exploited for wide range of applications. This project, in partnership with BAZL (or FOCA Federal Office for Civil Aviation) aims at characterizing the acoustic footprint of drones and potentially support the future regulation.
One of the main particularities of this project is that the study focuses on the noise emitted by drones during real manoeuvres. This makes the data collection more complicated but also makes it possible to get the measurements closer to the real work conditions of the drone. Furthermore, with this approach, it is possible to take the flight mechanics of drones into account and for instance correlate the fluctuations of the rotational speed to the noise spectrum.
Main Goals
Inside this collaboration frame, NEAPTIDE project intends to provide three main goals. The first goal is to collect and analyse experimental data acquired from different drones during manoeuvres. The second objective is to build a simple acoustic mathematical model, or adapt and customize an existing one, which is able to predict the noise for any drone configuration during a series of manoeuvres. Finally, a last step is proposed that performs the evaluation of the annoyance produced by each drone based on the noise predicted or measured.
The finality of this project is therefore to assess the annoyance of a drone based on the configuration and its flight mechanics. This output could be interesting not only for regulation purposes but also as a necessary first step for the acoustic optimization of drones.
Activities
To reach each of these objectives a series of activities have been carried out. Regarding the measurement and data collection:
- Definition of the experimental approach: Drone selection, manoeuvre definition, microphone positioning, etc.
- Design of the methodology for leading the measurements.
- Implementation of autonomous manoeuvres in the drones selected.
- Design and construction of the setup, including a 8m structure for the microphone array.
- Postprocessing of the results: Data storage, data filtering and data analysis.
The development of the modelling, so far mainly written in Python, requires a flexible and adaptable planning. Therefore, the definition of the activities in this field is harder. The following are some of the activities that can be defined:
- Understanding and comparing different analytic approaches to drone noise.
- Investigating the state of the art and evaluating pre-existing models.
- Identifying the necessary input for the acoustic evaluation and options to feed this data.
- Developing provisional plans, exploring new possibilities, and working on pre-examples.
- Building the final model.
- Debugging, validating, and cleaning the code.
Results
The building of the setup has been successfully performed with a item-profile based structure. Furthermore, thanks to the smart solutions from item, the structure allows to have a adjustable microphone positioning. Therefore, the setup can be easily re-adjusted for measuring different drones.

The implementation of fully automated manoeuvres has also been completed for all drones proposed. The following picture show a demonstration of the manoeuvres performed by DJI Matrice 300 RTK.

Calibration checks were performed before and after each measurement set to guaranty the good performance of the microphones during the whole measuring time. One can see in the following figure the calibration setup used in the project.

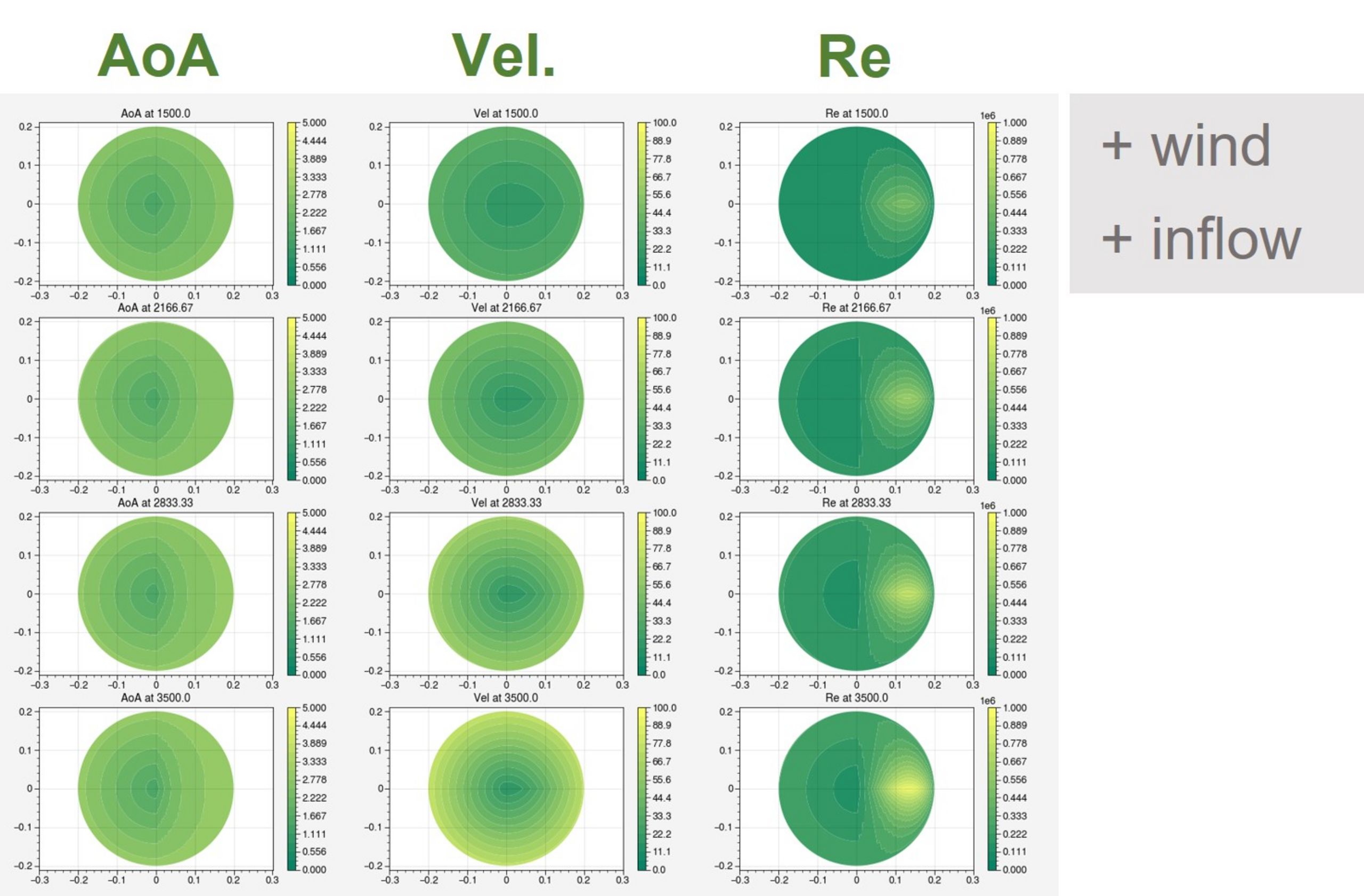
On the modelling side first results have been oriented to managing the drone displacements and getting a first approximation of the flow predictions in the rotors. The following figures show the very first estimations made for the Reynolds number (Re), the relative velocity (Vel.) and the angle of attack (AoA) for each drone position for a forwards moving drone.
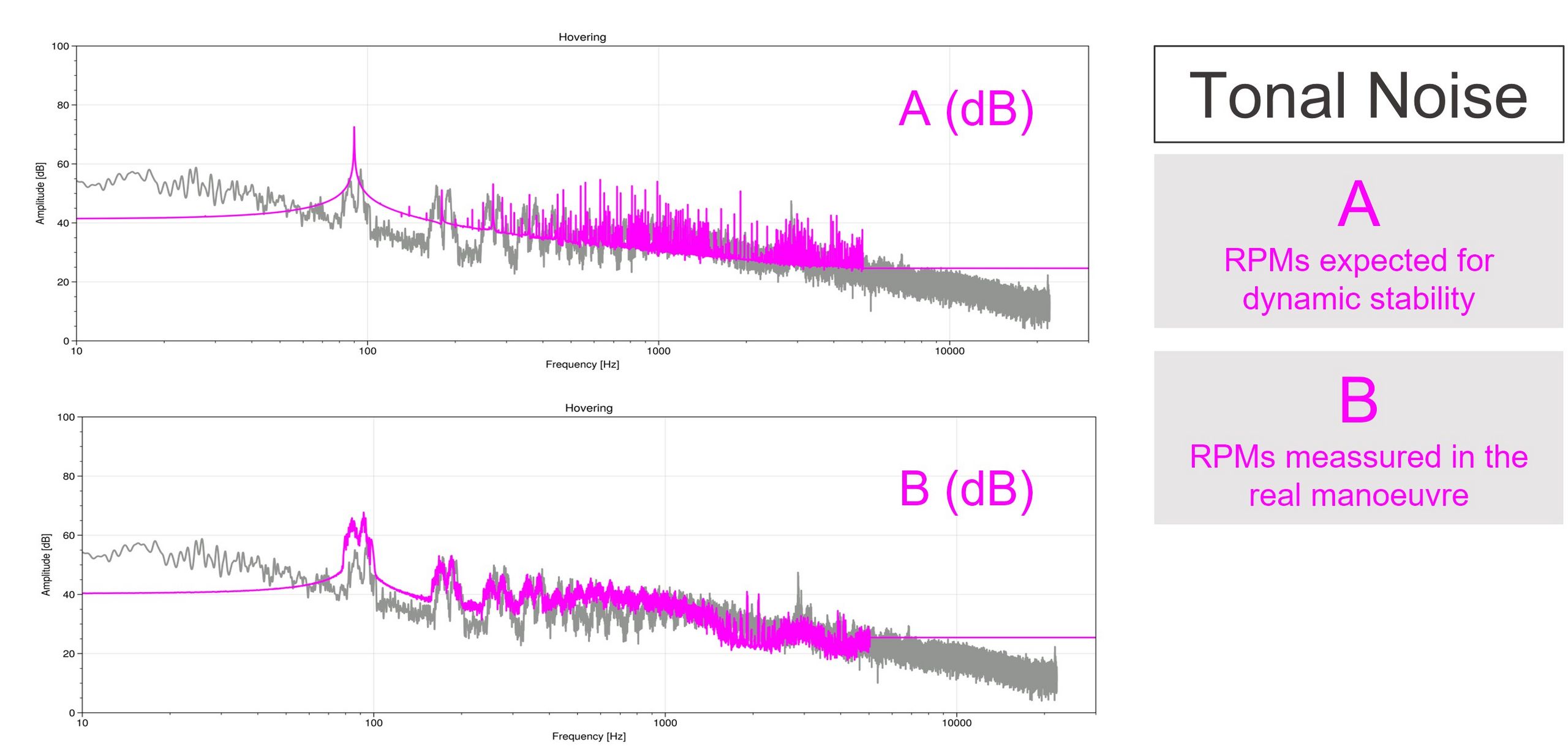
These results were used to get the tonal noise prediction, by implementing a pre-integrated form of the tonal terms in Ffowcs Williams and Hawkings Equation proposed in the literature (Aeroacoustics of low Mach number Flows, S. Glegg & W. Devenport). While implementing this formula a great influence of rpm was observed. In fact, predictions with poorly approximated rpm and real measured rpm were compared to prove the critical influence of this factor; the results of analysis are shown in the following figure:
The focus is set now on two areas: The first one is improving the modelling of the drone (including the modelling of the drone control system, the flight mechanics and rotor aerodynamics) and the Second completing and refining the acoustic analysis.

ZHAW
School of Engineering
Technikumstrasse 9
8400 Winterthur