Wireless Body Area Network for Autonomous Robots (roboBAN)
Autonomous walking machines need sensors on each foot for measuring the landing force in three dimensions. Cables for the sensors limit the mobility of the legs.
We developed a concept for a wireless body area network including achieving sufficient transmission reliability and transmission frequency for closed-loop control applications. The WBAN is designed for the use of energy harvesting components.
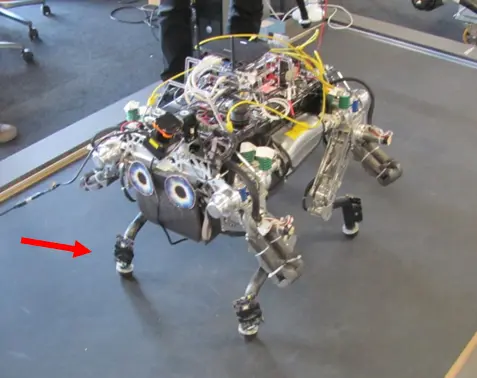
In tests with the ETH robot “StarlETH” the feasibility was proven in a real-world application. The prototype consists of four wireless sensor nodes, each measure the force in three dimensions. Each sensor node sends a 19 bytes large radio packet in advertising method to the central unit on three radio channels every millisecond. The system needs a total of 8.6 uJ at 0 dBm output power. The concept can be extended without any modification up to 256 nodes.
The results can be directly transferred to sensors and sensor networks on the human body. Examples are fitness or medical applications.
