Demonstrator for IMU data fusion
Initial situation
With an IMU sensor or an Inertial Measurement Unit, acceleration and rotation rate measurement values can be acquired and the orientation of an object can be estimated from them. An IMU sensor consists of a 3-axis acceleration sensor and a 3-axis rotation rate sensor (gyroscope). Sometimes a 3-axis magnetometer is also integrated into the sensor.
MEMS-based IMU sensors are relatively inexpensive today because they are installed in large numbers in smartphones, drones, etc.. As a result, they are increasingly being integrated into products with smaller quantities.
In recent years, the Institute of Signal Processing and Wireless Communications (ISC) has realized numerous research projects in which IMU sensors played a central role. In this context, the following "IMU demonstrator" and and the associated video were created in this context.
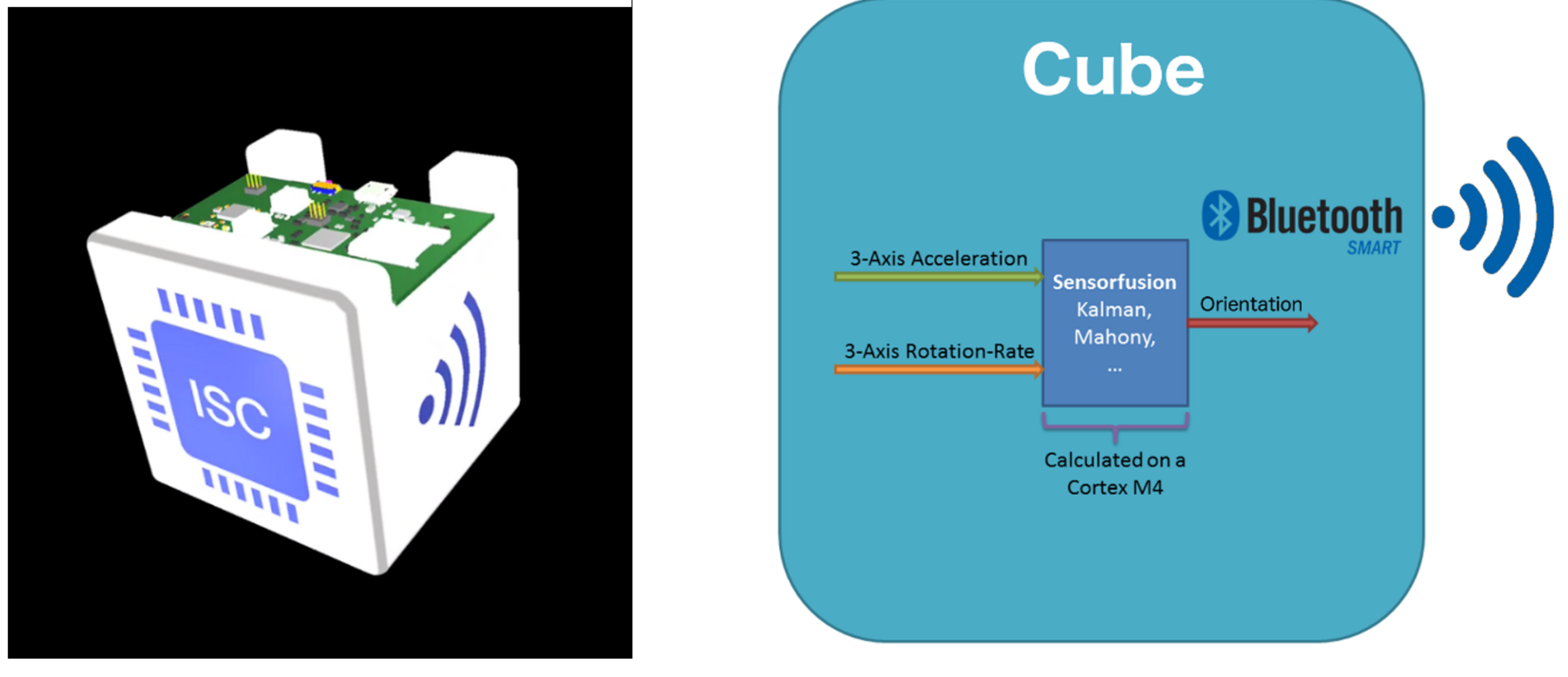
The demo cube contains an IMU sensor, an ARM Cortex M4 microcontroller, a Bluetooth Low Energy interface and a battery. The IMU sensor captures acceleration values 100 times per second in the direction of the local x, y, and z axes, as well as the 3 angular velocities or rotation rates about the axes. In the microcontroller, the orientation of the demo cube is estimated using a data fusion algorithm and the resulting data (quaternions) is transferred to a tablet for real-time display.
Video
In the following video the orientation determination is demonstrated
- using a data fusion of the accelerometer and gyroscope readings,
- using only the accelerometer data,
- using only the gyroscope data and
- using only the magnetometer data.
The corresponding strengths and weaknesses are shown.
