Projektbeispiel: Optimale Bahnplanung
SCARA-Roboter sind horizontale Gelenkarmroboter, geeignet für die Einsatz in den folgenden Bereichen:
- Montageaufgaben, Verpackungsanwendungen oder Pick-and-Place-Anwendungen in der Industrie,
- beim Einsatz von Liquid-Handling-Systemen oder bei der Arbeit in korrosiven Umgebungen im Labor,
- Roboter-gestützte Implantation von Knie- sowie Hüftprothesen.
Sie zeichnen sich durch einen geringen Platzbedarf und hohe Robustheit, Geschwindigkeit sowie Präzision aus, welche jedoch nur durch eine optimale Planung ihrer Bewegungen (Bahnplanung) erreicht werden kann.
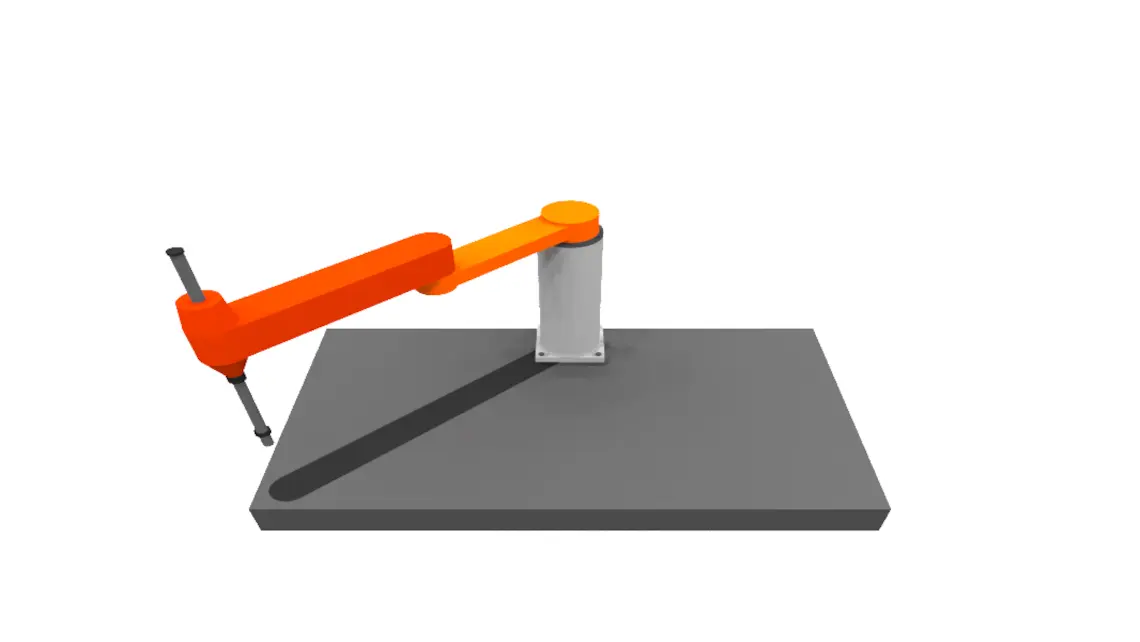
Zur Illustration betrachten wir im Folgenden einen klassischen zweigelenkigen SCARA-Manipulator und platzieren ihn in einem rechteckigen Bereich, welcher im Arbeitsbereich des Roboters enthalten ist und vom Roboter im Betrieb nicht verlassen werden darf.
Der SCARA-Roboter soll sich zwischen zwei beliebigen vorgegebenen Positionen im Arbeitsbereich bewegen, und
- sich schnellstmöglich auf einer glatten und kollisionsfreien Bahn gemäss den Bewegungsgleichungen bewegen
- die Grenzen des Arbeitsbereichs einhalten,
- die vorgegebenen physikalischen Grenzen für Gelenkwinkel, Gelenkgeschwindigkeiten, Drehmomente und Geschwindigkeiten des Endeffektors nicht überschreiten.
Für die Lösung dieser Bahnplanungsaufgabe wurde am Schwerpunkt WRA ein Software-Tool entwickelt, welches die Zeit-optimale Bahn (Trajektorie) berechnet, die alle oben genannten Anforderungen erfüllt. Sie ist glatt, mechanisch machbar und kann vom Feedback-Controller des Roboters perfekt abgefahren werden. Darüber hinaus ermöglicht die geringe Rechenzeit des Tools eine Echtzeitberechnung der Trajektorien auf einer Embedded CPU.
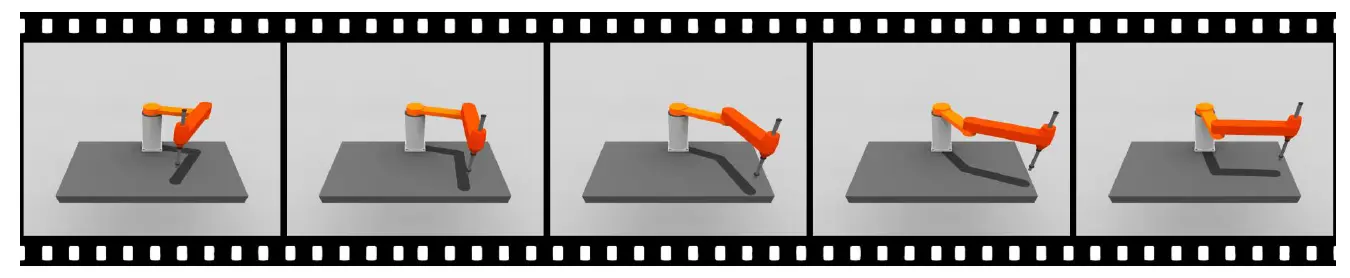
Die folgende Animation zeigt ein Beispiel einer solchen berechneten Zeit-optimalen Trajektorie.