Labor UMARS 2.0
Die unbemannte Forschungsdrohne des Zentrums für Aviatik

Labor- und Systembeschreibung
UMARS 2.0 – die zweite Iteration des Unmanned Modular Airborne Research Systems des Zentrums für Aviatik. Mit einer Spannweite von fünf Metern und einem Abfluggewicht (MTOM) unter 30 kg ist der UMARS 2.0 eine moderne Forschungsdrohne, womit auch kompliziertere oder längere Missionen durchgeführt werden können. Der UMARS wurde in Zusammenarbeit mit dem Institut für Mechanische Systeme (IMES) entwickelt und kann dank seiner modularen Rumpfbauweise mit verschiedensten Messgeräten ausgestattet werden. Somit sind Einsätze verschiedenster Art – dank eines Autopiloten auch autonom – möglich, zum Beispiel zum Zweck der meteorologischen Forschung, Umweltwissenschaften, Vermessungsmissionen oder der Erprobung neuer Flugregler oder generellen Flugmechanik-Themen.
Entwicklung
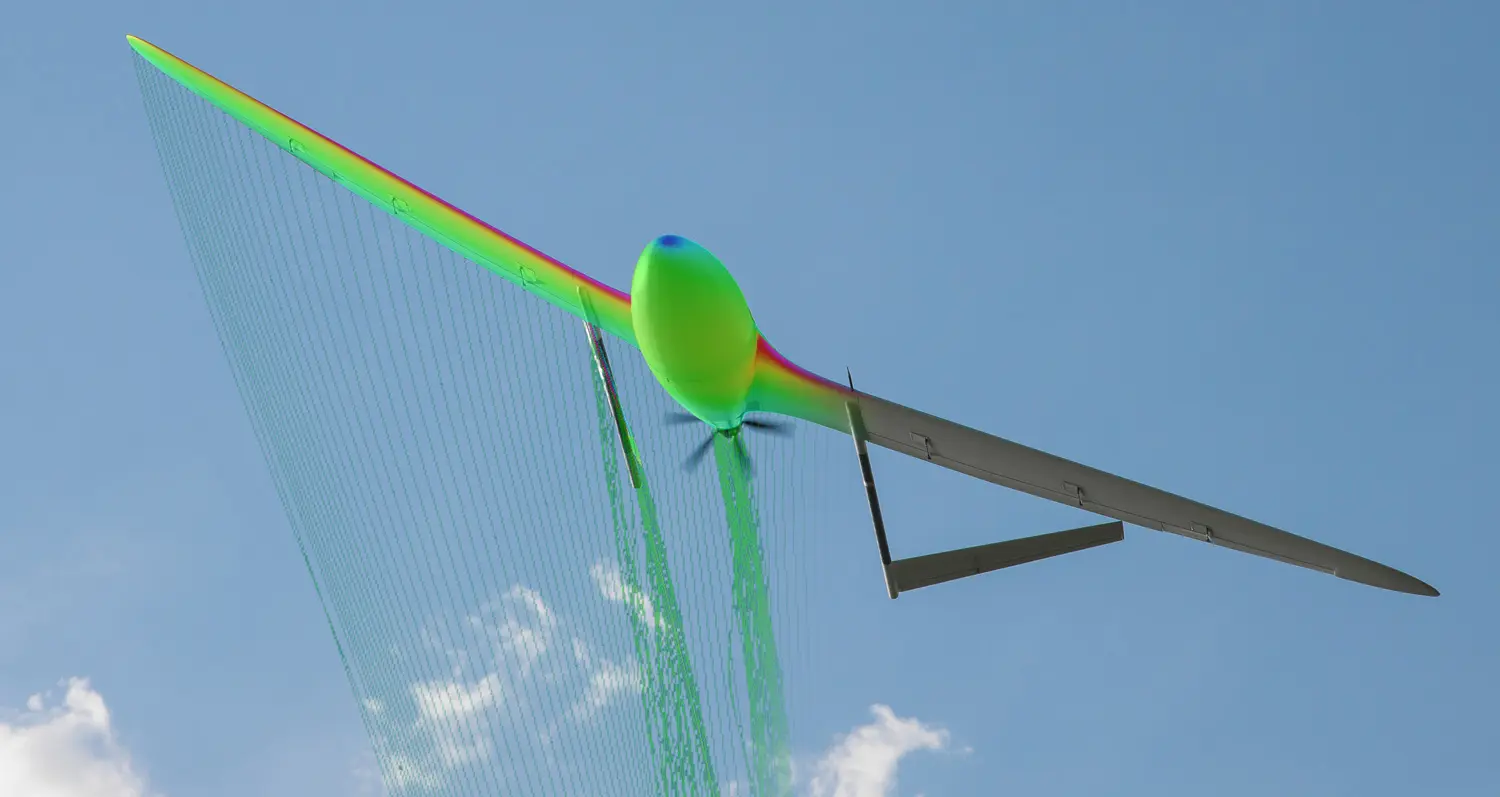

Der UMARS ist eine gemeinsame Entwicklung des Zentrums für Aviatik (ZAV) und des Instituts für Mechanische Systeme (IMES) der ZHAW School of Engineering. Dabei wurde das aerodynamische Konzept hauptsächlich vom Zentrum für Aviatik ausgearbeitet, wohingegen das IMES bei strukturellen Fragen federführend war. Das Ziel der Maximierung der aerodynamischen Effizienz bei der Erhaltung von möglichst gutmütigen Flugeigenschaften wurde mit dem gezielten Einsatz von hochwertiger Simulationssoftware erreicht. Nach dem Bau eines Prototyps und Demonstrators und dessen Flugerprobung und Validierung der Simulationen floss das daraus gelernte Wissen in die Entwicklung des UMARS 2.0 ein. Der UMARS 2.0 verfügt über einen effizienteren Flügel, ein geteiltes V-Leitwerk und eine vergrösserte Payload-Bay. Das Avionik-Konzept wurde gemäss System-Safety-Philisophie analysiert und optimiert. Dank des integrierten Notfallschirmsystems ist der UMARS 2.0 gegen eventuelle Störungen gut abgesichert. Gestartet wird der UMARS 2.0 mithilfe eines abwerfbaren Startwagens, sodass auf ein bremsendes starres Fahrwerk verzichtet werden und eine grössere Endurance erzielt werden kann. Ein Rumpf mit starrem Fahrwerk befindet sich allerdings in Entwicklung.
Einsatzmöglichkeiten

Der UMARS 2.0 ist dank der modularen Bauweise des Rumpfs und seiner grossen Payload-Bay für verschiedenste Anwendungsbereiche adaptierbar. Bei Bedarf kann das Gewicht der Payload auf Kosten der mitgeführten Antriebsakkus erhöht werden. Dank des integrierten Pixhawk-Autopiloten können Missionen vorprogrammiert und vom UAS autonom geflogen werden. So sind für den Betrieb des UMARS nur mindestens zwei Operateure nötig, wobei einer als Pilot agiert und einer den Luftraum und Telemetriedaten des UMARS überwacht.
Ein möglicher Einsatzbereich des UMARS ist das Messen der Luftbeschaffenheit, der Nachweis von Spurengasen oder zum erheben Bildanalysen der Erdoberfläche. Im Gegensatz zu einem manntragenden Flugzeug als Sensorträger kann der UMARS direkt im Missionsgebiet starten und ist nicht auf Flugplatzinfrastruktur angewiesen. Ausserdem ist der Betrieb des UMARS wesentlich kosteneffektiver als ein manntragendes Flugzeug mit entsprechender Sensorik. Eine entsprechende Kampagne wurde schon 2011 mit UMARS 1 im Reusstal durchgeführt.
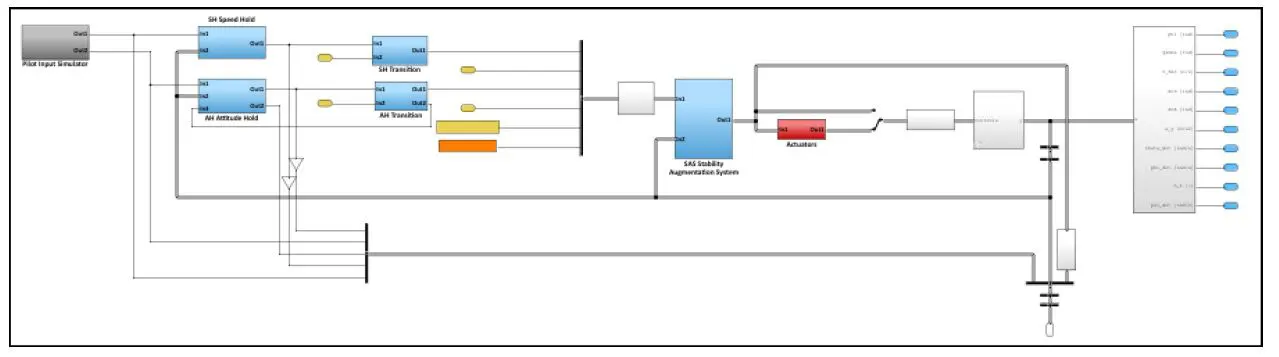
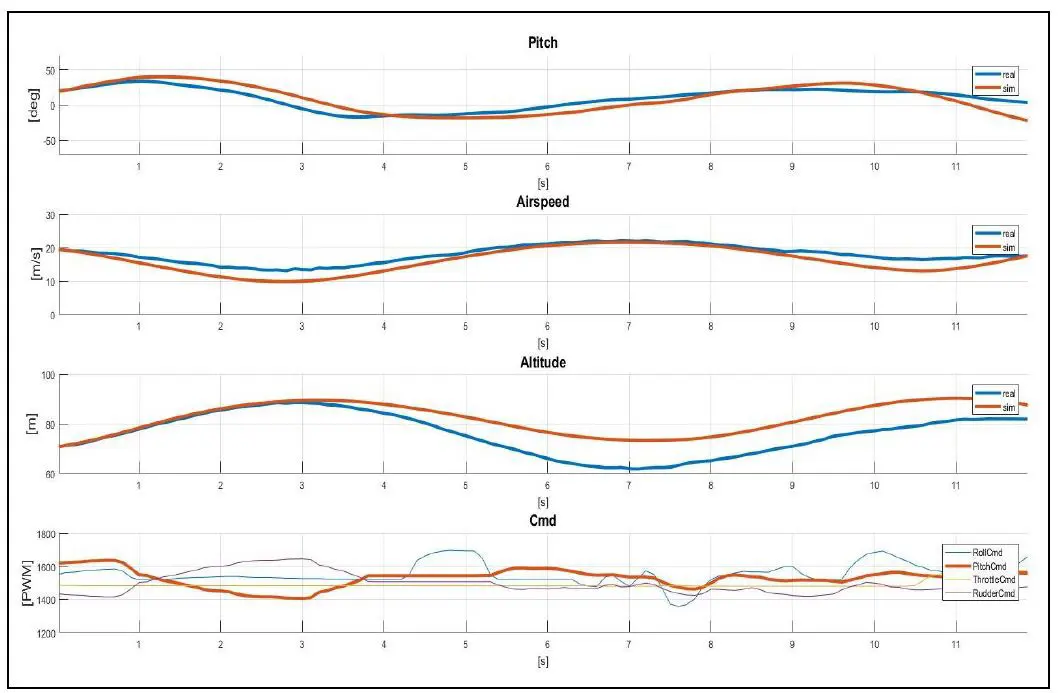
Ausserdem kann UMARS 2.0 als Erprobungsträger bei Themen rund um Flugmechanik und Flugregelungssystemen verwendet werden. Das Zentrum für Aviatik verfügt über ein Flugdynamikmodell in Simulink des UMARS, womit sich das dynamische Verhalten des UMARS gut simulieren lässt. Somit ist UMARS auch ein praktisches Werkzeug in der Lehre für den Studiengang Aviatik, wo diverse Bachelorarbeiten zu diesem Thema erarbeitet wurden. UMARS wird in einer späteren Phase des Projekts HORUS ebenfalls als Versuchsträger zur Verfügung stehen.
Steckbrief UMARS 2.0
/ Spannweite: 4.98 m
/ Länge: 2.49 m
/ Max. Abflugmasse: 30 kg
/ Payload Volume: 45 l
/ Max. Endurance: 1 h
/ Reisefluggeschwindigkeit: 20 m/s (72 km/h)
/ Antrieb: Elektrisch
/ Autopilot: Pixhawk
/ Min. Crew: 2