Abgeschlossene MSE-Vertiefungsprojekte
MSE-Studierende des IMS müssen im Rahmen ihres Masterstudiums im Bereich Industrial Technologies zwei bis vier Vertiefungsarbeiten durchführen. Im Folgenden finden Sie Beispiele solcher Vertiefungsarbeiten.
Robotergestützte Single-Cut-Osteotomie
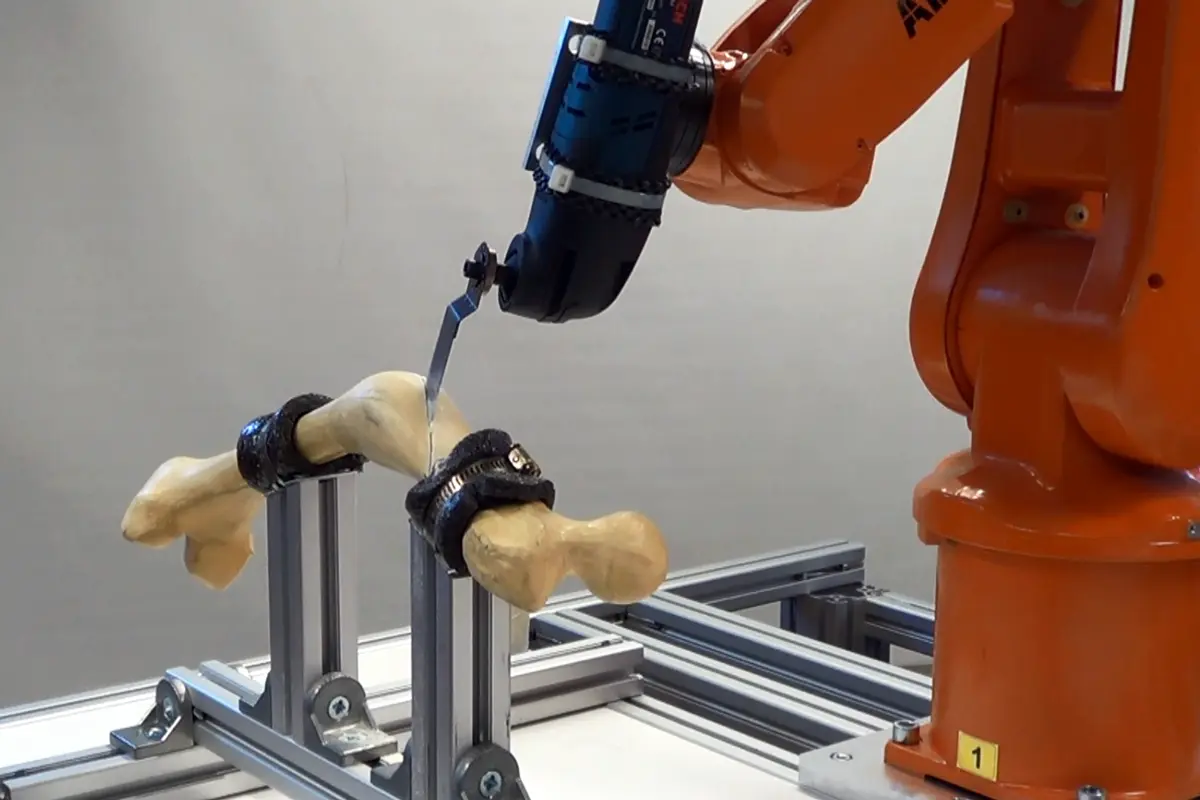
Ziel dieser Vertiefungsarbeit war die Entwicklung eines Tools zur Unterstützung von Ärzten bei Single-Cut-Osteotomien (chirurgischer Eingriff). Dazu wurde ein Software-Planungstool entwickelt und eine mögliche Umsetzung mit einem Industrieroboter getestet.
Trotz sorgfältiger Behandlung können Brüche langer Röhrenknochen schief zusammenwachsen, was bei betroffenen Patienten langfristig zu schwerwiegenden Schäden führen kann.
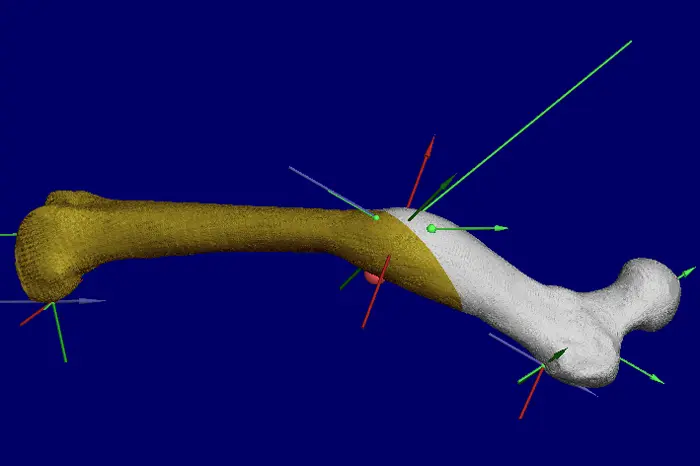
In vielen Fällen ist es jedoch möglich, einen falsch zusammengewachsenen Knochen mittels der sogenannten Single-Cut-Osteotomie in seine ursprüngliche Form (Länge, Achse, Orientierung) zurückzubringen. Bei dieser Prozedur wird der Knochen anhand eines einzigen Schnitts (Single Cut) in zwei Fragmente zerteilt (Osteotomie), welche anschliessend längs der Schnittebene gegeneinander rotiert werden.
Da diese Prozedur (insbesondere die Berechnung) relativ aufwändig ist, wurde in einer IMS-Vertiefungsarbeit ein Software-Tool entwickelt, welches Chirurgen bei der Planung des operativen Eingriffs unterstützt. Die im Tool berechneten Schnittdaten wurden anschliessend an einen ABB IRB 120 Roboter übertragen und an einem Modell eines Oberschenkelknochens in der Realität erfolgreich getestet.
Videos

Ansprechpartner IMS
-

ZHAW School of Engineering
Technikumstrasse 9
8400 Winterthur
Weitere Infos
Weitere Infos finden Sie auch im STZ-Artikel (PDF 219,5 KB)zum betreffenden Projekt.
Fernsteuerungs-Applikation für den mobilen Roboter FORBOT

Mobile Roboter bewegen sich heute vermehrt selbständig durch Umgebungen mit Hindernissen verschiedenster Art. Damit die Geräte nicht permanent durch einen Bediener überwacht werden müssen, werden sie mit aufwändiger Sensorik ausgerüstet. Damit die Verarbeitung der Sensoriksignale und die daraus folgenden Steuerbefehle jeweils rechtzeitig und priorisiert zu den Motorcontrollern gelangen, werden Echtzeitrechner eingesetzt.
Ziel dieser Vertiefungsarbeit war die Inbetriebnahme eines weichen Echtzeitbetriebssystems mit Tablet-Steuerungsapplikation für den mobilen IMS-Roboter FORBOT. Nach der Evaluation verschiedener Systeme wurde im Rahmen der Arbeit für den FORBOT ein Steuerungsrechner mit Echtzeit-Systemkern aufgesetzt und in C++ eine Steuerungsapplikation entwickelt. Diese Applikation ermöglicht eine intiuitive, drahtlose Steuerung des Roboters mittels Tablet.
Video
Ansprechpartner IMS
Vorstudie für einen interaktiven Billardroboter

Ziel dieser Vertiefungsarbeit war es abzuklären, ob es möglich und sinnvoll ist, einen Billardroboter analog zu einem Schachcomputer umzusetzen.
In jeder guten Spielhalle hat es im Minimum einen Billardtisch, bei dem man versuchen kann mit seinem Spiel zu glänzen. Doch wie es meistens im Leben ist, hat man gute oder schlechte Tage. Dann will kein einziger Stoss gelingen, obwohl man doch selbst einen Billardtisch zu Hause hat. Leider ist es so, dass die Lust zum Spielen schnell vergeht, wenn man gegen sich selbst spielt. Wie schön wäre es doch analog zu einem Schachcomputer einen Billardroboter zu besitzen.
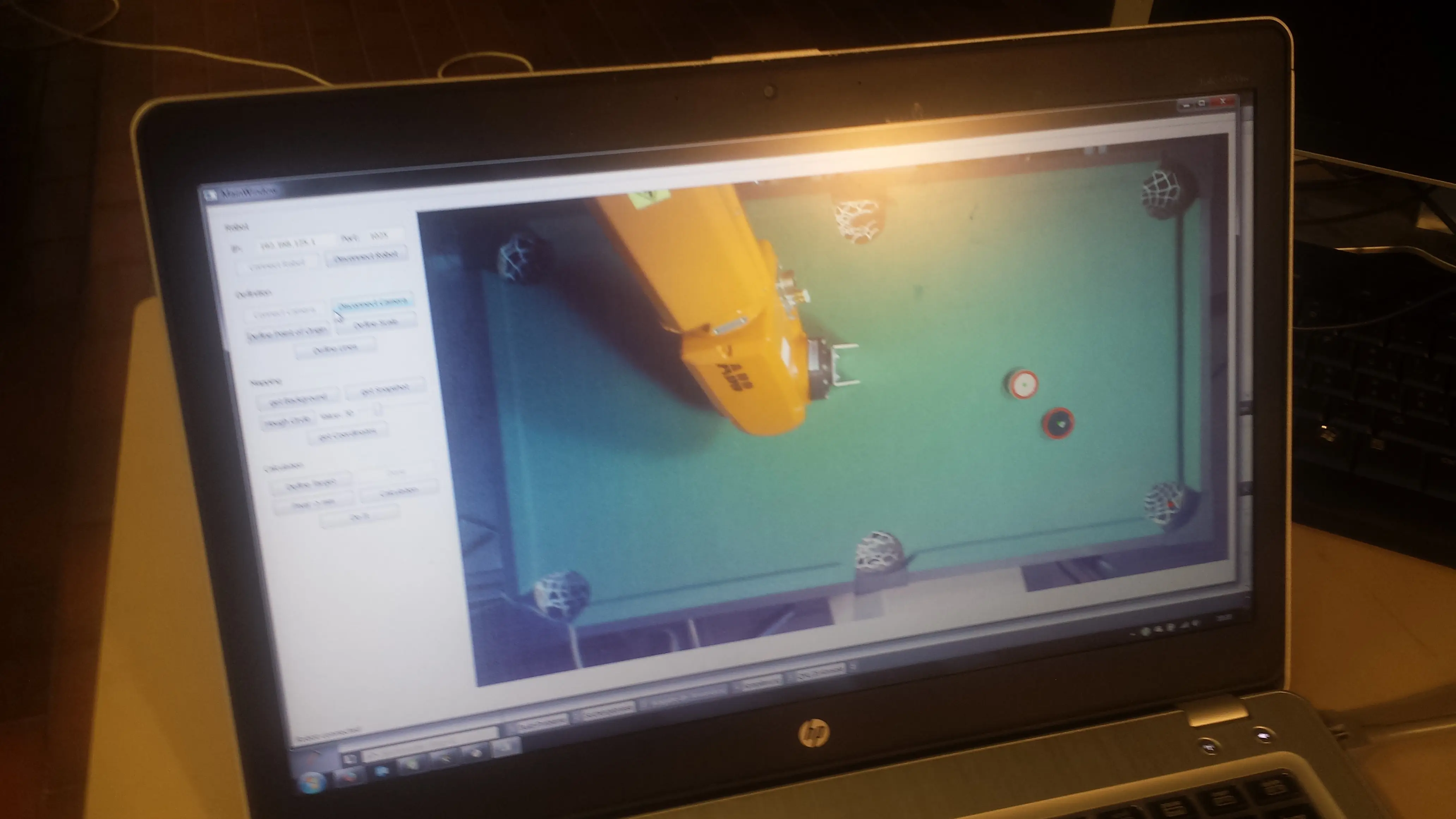
Diese Vertiefungsarbeit befasst sich mit eben dieser Aufgabenstellung. Im Projekt sollte abgeklärt werden, ob es möglich und sinnvoll ist, einen Billardroboter umzusetzen. Es wurde aber kein komplettes Spiel aufgebaut, sondern nur der finale Stoss mit zwei Kugeln ausgeführt. Um den Stoss umsetzen zu können, wurden verschiedene Probleme analysiert und gelöst, wie die Kugel-Positionen auf dem Tisch oder die Berechnung des Stosses.
Um eigenständig Billard spielen zu können, wurde der Roboter mit einem Steuerrechner verbunden. Dieser wiederum kann mittels einer Industriekamera ein Bild der aktuellen Lage des Tisches aufnehmen und aus diesem die Position aller Kugeln auslesen. Nachdem die Positionen aller Kugeln bekannt ist, kann eine Ziel-Tasche definiert und die Berechnung gestartet werden. Als Resultat der Simulation wird dem Roboter der zum Stoss benötigte Winkel mittels TCP/IP übergeben. Zusammen mit der errechneten Position der Kugel kann er den Stoss ausführen und die Kugel einlochen.
Zurzeit ist die Genauigkeit noch ein Problem, da die Koordinaten der Bildverarbeitung nicht korrekt sind. Dennoch ist mit dieser Anwendung eine gute Basis für einen interaktiven Billardroboter geschaffen worden, welche in weiteren Arbeiten verfolgt werden kann, bis man auch in einer Spielhalle gegen einen Roboter spielen und trainieren kann.
Ansprechpartner IMS
-
ZHAW School of Engineering
Technikumstrasse 9
8400 Winterthur
Weitere Infos
Weitere Infos finden Sie auch im Bericht (PDF 2,2 MB)zum betreffenden Projekt.