DockWeeder
Mit dem DockWeeder auf Unkrautjagd
Jäten könnte in Zukunft von Robotern übernommen werden. Forschende der ZHAW School of Engineering arbeiten in einem europäischen Forschungsprojekt daran, Grünflächen effizient in 3D zu scannen. Ziel ist es, dabei Pflanzenarten zuverlässig voneinander unterscheiden zu können.
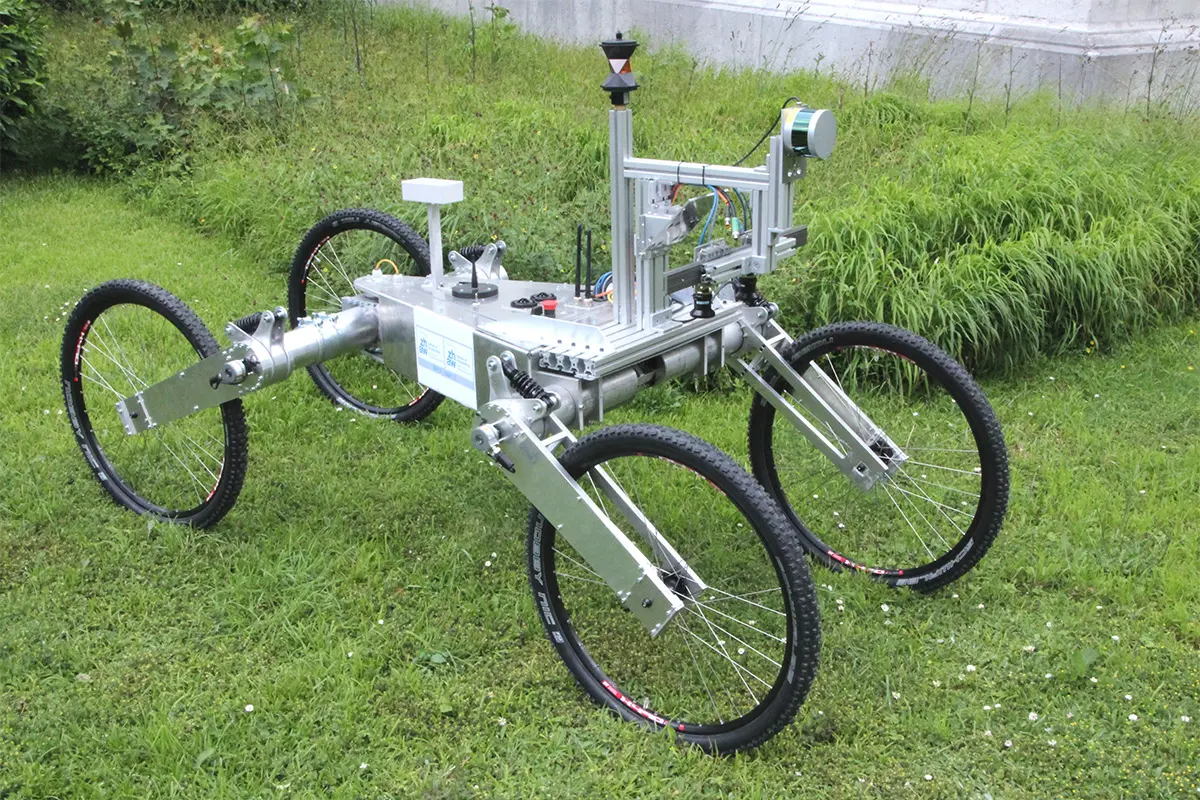
Auf seinen vier Mountainbikereifen bahnt sich der «Maveric» seinen Weg über das Feld. Nicht ferngesteuert, sondern völlig autonom fährt er seine Route ab, um jeden Quadratmeter Wiese einzuscannen. Auf dem an der ZHAW School of Engineering entwickelten UGV (engl. Unmanned Ground Vehicle) ist ein Sensorsystem bestehend aus drei Kameras und einem Laserscanner aufgebaut. In Echtzeit analysiert eine Software anhand der erfassten 3D-Daten die einzelnen Pflanzen und detektiert darin das Unkraut. Unmittelbar danach folgt ein Roboterschwarm und behandelt das lokalisierte Unkraut aufgrund der genauen Positionsdaten mit heissem Wasserdampf. – Soweit die Zielsetzung des von der EU geförderten Forschungsprojekts DockWeeder. Zu den Projektpartnern zählt auch das Institut für Mechatronische Systeme (IMS) der ZHAW School of Engineering. «Im Grunde geht es darum, Bilder zu erkennen und zu interpretieren; ähnlich wie beispielsweise die automatische Gesichtserkennung auf Facebook», erklärt Dr. Dejan Seatovic vom IMS. «In unserem Fall ist das Ganze allerdings viel aufwändiger, denn wir analysieren nicht bloss Bilder, sondern auch 3D-Daten von Pflanzen in ungeordneter Umgebung – eine Wiese ist sozusagen der komplizierteste Fall.»
«Wir analysieren nicht bloss Bilder, sondern auch 3D-Daten von Pflanzen in ungeordneter Umgebung – eine Wiese ist sozusagen der komplizierteste Fall.»
Dejan Seatovic
Pflanzen permanent in Bewegung
Die Herausforderung für Dejan Seatovic und sein Team liegt darin, ein hochauflösendes Sensorsystem zu bauen, dass die Pflanzen zuverlässig erkennen und unterscheiden kann – ganz ohne menschliche Interaktion. Nur wenn die Aufnahmen sehr hochaufgelöst sind, können die Daten zuverlässig ausgewertet werden. «Wir reden hier von einer Auflösung von 500dpi und mehr – das entspricht beinahe dem Doppelten von normaler Druckqualität», so Seatovic. Die hochaufgelösten Aufnahmen haben aber auch zur Folge, dass immense Datenmengen entstehen, die es innert kürzester Zeit zu verarbeiten gilt. Denn allein hundert Meter Bodenscan benötigen mehrere Gigabyte an Datenspeicher. «Maveric» scannt pro Sekunde einen Quadratmeter Boden. Innerhalb dieses Quadratmeters nimmt das System alle 20 Zentimeter ein hochaufgelöstes 3D-Bild auf. Eine weitere grosse Herausforderung ist dabei, dass die Natur dynamisch ist. «Eine Wiese verändert sich auch bei wenig Wind andauernd; die Pflanzen sind permanent in Bewegung», so Seatovic. «Die Aufnahmen müssen deshalb extrem kurz belichtet sein.» Konkret beträgt die Belichtungszeit nur rund 50 Mikrosekunden bzw. 0,00005 Sekunden. Stromsparende LEDs dienen dabei als Unterstützung für die notwendige Beleuchtung.


Unendlich grosse Vielfalt
Multi-Sensorsysteme gekoppelt an leistungsfähige Rechner mit Machine Learning-Komponenten bilden die Basis für die Problemlösung. Ein System zur automatischen Detektion der weit verbreiteten Ampfer hat Dejan Seatovic bereits erfolgreich umgesetzt. Ziel des Projekts DockWeeder ist es aber, die Software so weit zu entwickeln, dass sie nicht nur für bestimmte Gebiete und Pflanzenarten funktioniert, sondern flexibel überall eingesetzt werden kann. «Jede Pflanze ist anders – das macht unser zu lösendes Problem quasi unendlich gross», so Seatovic. «Dazu kommt die Biodiversität; je nach Land und Region gibt es wieder andere Pflanzenarten.» Demnächst werden zwei ZHAW-Masterstudierende nach Frankreich und in die Niederlande reisen, um weitere Daten zu sammeln. Die Hardware muss dazu nicht zwingend auf dem «Maveric» platziert sein. Sie lässt sich auf jedem beliebigen landwirtschaftlichen Fahrzeug installieren.
Weitere Anwendungen denkbar
Die Automatisierung der Landwirtschaft verläuft langsamer als in finanzstarken Branchen, doch aufzuhalten ist sie nicht. Wenn die Software einst Pflanzen einwandfrei erkennt, wird das System auch für andere Zwecke als die Unkrautvernichtung angewendet werden können, ist Seatovic überzeugt: «Man könnte beispielsweise auch das Wachstum und die Entwicklung der Pflanzen kontrollieren. Daraus liessen sich dann Rückschlüsse ziehen auf Bewässerung und Düngung, um diese zu optimieren.»
Auf einen Blick
Beteiligte Institute und Zentren: Institut für Mechatronische Systeme (IMS)
Projektkoordinator: Stichting Dienst Landbouwkundig Onderzoek (DLO), Niederlande
Finanzierung: EU-Forschungsprogramm ICT-AGRI
Projektstatus: beendet