Bachelorarbeit Systemtechnik: Entwicklung einer Quadrocopter-Plattform mit Pixhawk-Board
Wilden Tieren von oben auf der Spur
Ferngesteuerte Flugobjekte bieten viele Anwendungsmöglichkeiten – so auch für den Einsatz in der Natur beim Wildtier-Management. Die Systemtechnik-Absolventen Mario Castelli und Martin Sprecher haben dazu einen speziellen Multicopter entwickelt und getestet.
Die Firmen wildebeest und swisscoast wollen im Bereich des Wildtier-Managements künftig ein ferngesteuertes Flugobjekt einsetzen. Ein solcher Multicopter muss für seinen speziellen Aufgabenbereich bestimmte Anforderungen erfüllen: Er soll möglichst leise sein, damit er von den Tieren nicht bemerkt wird. Ausserdem muss er ein zusätz-liches Gewicht von bis zu 2 kg während einer Flugdauer von mindestens 15 Minuten mitführen können. Die grösste Herausforderung besteht allerdings darin, dass der Multicopter an seinem Schwerpunkt über einen schwenkbaren Mechanismus verfügen soll, an welchem verschiedene Geräte angebracht werden können. Am Markt ist bisher kein Flugobjekt erhältlich, das all diese Kriterien erfüllt.


Von Grund auf neue Konstruktion
Von Grund auf neue Konstruktion Im Rahmen eines KTI-Forschungsprojekts arbeitet man am ZHAW-Institut für Mechatronische Systeme an der Entwicklung eines geeigneten Fluggeräts.Die Systemtechnik-Absolventen Mario Castelli und Martin Sprecher konnten mit ihrer Bachelorarbeit einen wesentlichen Teil zum Gelingen des Projekts beitragen. «Zunächst wollten die Auftraggeber eine bereits vorhandene Flugdrohne für ihre Zwecke umbauen lassen», erklärt Martin Sprecher. «Allerdings wurde schnell klar, dass es bei den hier vorliegenden Anforderungen ein von Grund auf neu konzipiertes Fluggerät braucht.» Denn der geforderte schwenkbare Mechanismus in der Mitte erlaubt es nicht, dass die Ausleger, an welchen die Motoren angebracht sind, wie üblich zentral zusammengeführt werden. Aus diesem Grund haben die Absolventen ein Grundgerüst für den Multicopter entwickelt, das die Motoren in zwei Punkten zusammenführt und diese anschliessend miteinander verbindet. «Aufgrund theoretischer Schubberechnungen und der Anforderung,dass das Fluggerät möglichst leise sein soll, haben wir uns für ein Hexacopter-Konzept mit sechs Propellern mit je einem Durchmesser von 15‘‘ – das sind rund 38 cm – entschieden», erklärt Mario Castelli.
«Ein ruhiger Flug ist eine zwingende Anforderung an das System.»
Mario Castelli
Steuerung mit Pixhawk-Board
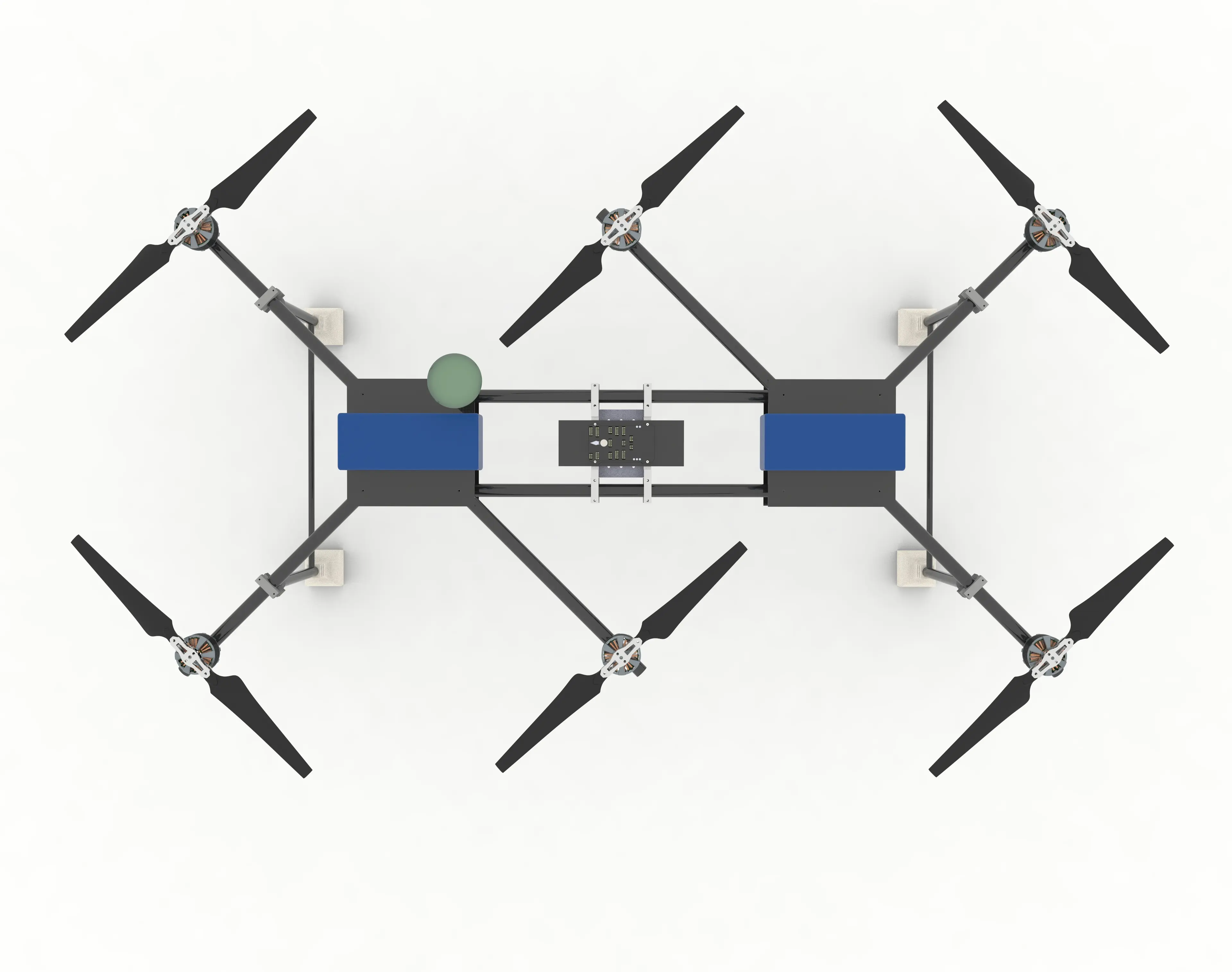
Die benötigte elektrische Energie liefern zwei Lithium-Polymer-Akkus mit je 22,2 V Spannung und einer Stromstärke von 8000 mAh – sowie entsprechendem Gewicht: «Die beiden Akkus wiegen beide jeweils mehr als ein Kilo», so Mario Castelli. Die H-förmige Anordnung der Motoren und die dezentrale Lage der schweren Akkus haben grossen Einfluss auf die Dynamik und Stabilität in der Luft. Gesteuert wird der Hexacopter mit einem auf Open-Source basierenden Pixhawk-Board. «Das Board wurde an der ETH Zürich speziell fürden Einsatz in unterschiedlichen Flugobjekten entwickelt», so Martin Sprecher. «Dank seiner frei zugänglichen Programmierung ist es für dieses Projekt sehr gut geeignet.»
Messungen und Flugversuche
Im zweiten Teil ihrer Arbeit haben Mario Castelli und Martin Sprecher am flugfähigen Objekt sowie im Labor verschiedene Versuche durchgeführt, um die Funktionalität, das Flugverhalten, die GPSGenauigkeit sowie die Tragfähigkeit zu untersuchen und zu verbessern. «Ein ruhiger Flug ist eine zwingende Anforderung an das System», so Mario Castelli. «Eine weitere Anforderung ist das möglichst genaue Schweben an einem Ort.» Weiter haben sie im Rahmen des Forschungsprojektes entwickelte Komponenten an der Drohne befestigt und während des Flugs getestet.
Bereit für die Testphase

«Noch betragen die Schwankungen beim GPS über eine längere Zeit rund zwei Meter», so Martin Sprecher. «Die Genauigkeit des GPS und auch die Höhenangabe gilt es im Rahmen des Forschungsprojektes noch zu optimieren.» Die betreuenden Dozenten Roland Büchi und Ruprecht Altenburger sind mit dem Ergebnis ihrer Absolventen zufrieden. Der Hexacopter ist leicht und leise, kann 2 kg an Gewicht zuladen und fliegt bis zu einer halben Stunde lang. Die Auftraggeber planen nun eine Testphase durchzuführen.
Weitere Informationen
<svg xmlns="http://www.w3.org/2000/svg" viewbox="0 0 256 256" class="iconpack phosphor phosphor-arrow-up-right-bold" fill="currentColor" role="img"><rect width="256" height="256" fill="none"></rect><line x1="64" y1="192" x2="192" y2="64" fill="none" stroke="currentColor" stroke-linecap="round" stroke-linejoin="round" stroke-width="24"></line><polyline points="88 64 192 64 192 168" fill="none" stroke="currentColor" stroke-linecap="round" stroke-linejoin="round" stroke-width="24"></polyline></svg>Bachelorstudium SystemtechnikInstitut für Mechatronische Systeme (IMS)
Infotage und Anmeldeschluss Bachelorstudiengänge
Anmeldung zum Bachelorstudium
- Zur Anmeldung (Anmeldeschluss: 30.04.2025)
Das könnte Sie auch interessieren
Aufnahmebedingungen
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Studiumsvorbereitung
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.
Anmeldung zum Bachelorstudium
Aufnahmebedingungen
Studiumsvorbereitung
Melden Sie sich jetzt zum Bachelorstudium an.
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.